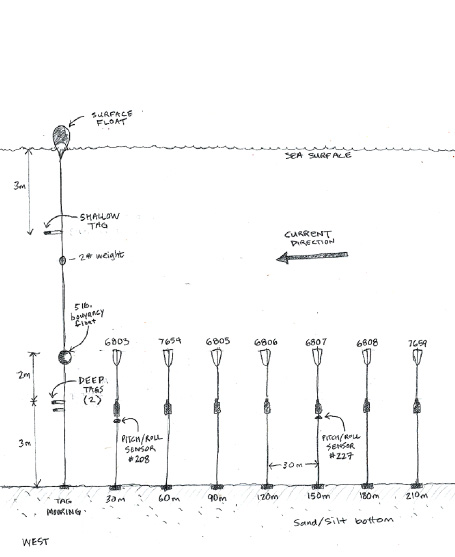
We deploy the array for several hours so that conditions will vary and we can later analyze the results to determine how the detection range changes with the conditions. While the test array is deployed we continually monitor and record weather conditions (wind and wave height), current speed (using a Marsh-McBernie current meter), and water profile conditions (using a Hydrolab H20). We also record how far the VR2s are tilted over due to current drag using Starr-Oddi pitch and roll sensors.
Our testing to date suggests a minimum receiver detection range of 240m. However, these tests were done during favorable conditions. Further testing is planned and under a wider range of conditions. This figure illustrates how our test array is configured.